








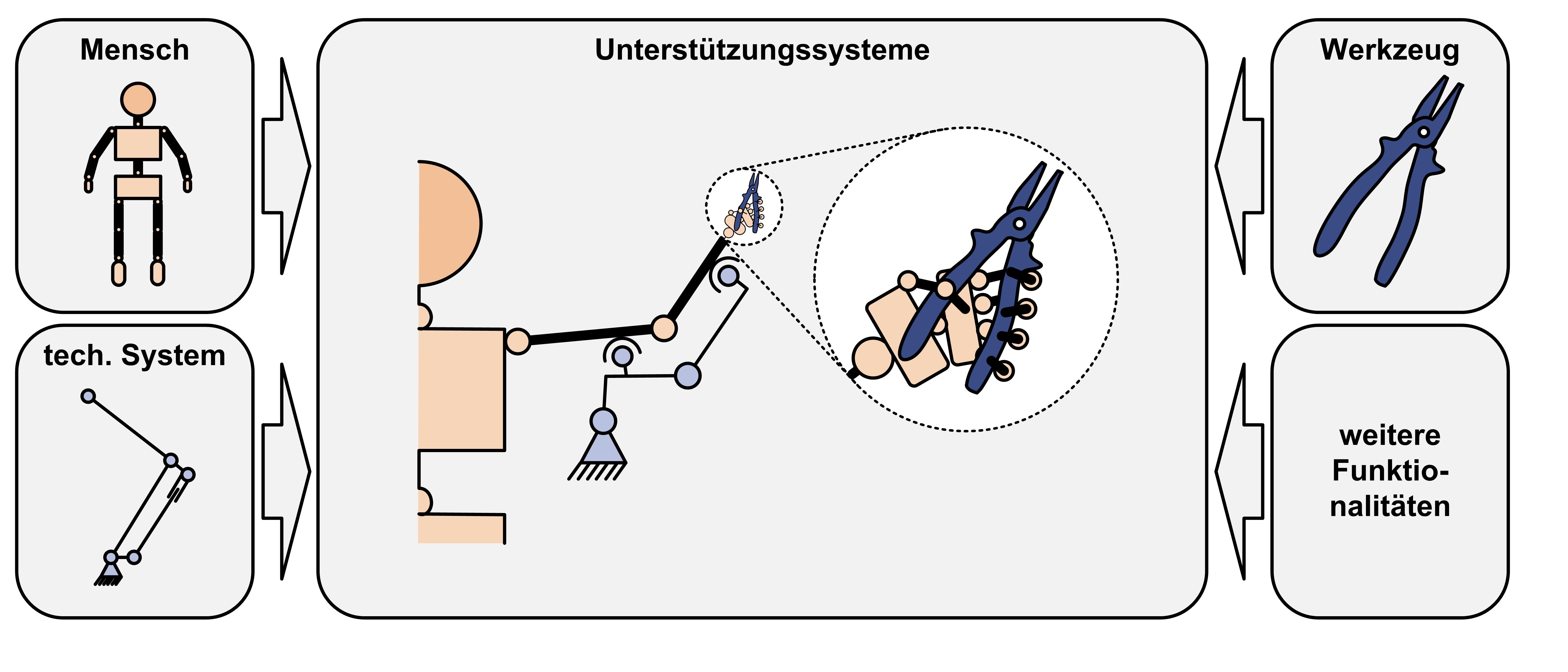
Einen Ansatz zur passiven aber auch aktiven Unterstützung manueller Tätigkeiten stellen Systeme nach dem Prinzip des Human Hybrid Robot (HHR) dar. Diese Systeme zeichnen sich durch eine modulare Systemarchitektur aus, die eine personen- und aufgabenangepasste Konfiguration ermöglicht. Um die individuellen, komplementären Vorteile des Menschen (z.B. gute Sensorik und Kognition) und der technischen Systeme (z.B. gute Wiederholgenauigkeit und hohe Ausdauer) nutzen zu können, werden biomechanische und technische Elemente seriell und/oder parallel intelligent gekoppelt (technische Systeme, Werkzeuge und Funktionalitäten mit den biologisch-physiologischen Voraussetzungen des Menschen).
Auf diese Weise sollen zum einen die sensomotorische Koordination, die kognitiven Funktionen sowie die sehr gut ausgeprägte Sensorik des Menschen und zum anderen die maschinenspezifischen Eigenschaften wie z.B. quantitative Charakterisierung, Kraftunterstützung und Ausführung von Tätigkeiten mit einem starken Wiederholcharakter optimal ausgeschöpft werden. Die Hoheit über das Unterstützungssystem besitzt stets der Mensch, der die Sollwerte der technischen Elemente vorgibt. Zwangsvorgaben seitens der Maschine sind nicht möglich; Bewegungskorridore lassen sich hingegen seitens des Menschen festlegen. Die Unterstützungssysteme sollen aus vorentwickelten Hard- und Software-Modulen (Baukastensystem) konfiguriert werden, die eine oder mehrere Funktionalitäten besitzen können. Dies führt u.a. zu einer höheren Flexibilität, da das technische System anwendungsbezogen an Aufgaben und Personen angepasst werden kann. Der Umfang der Kopplung biomechanischer und technischer Elemente kann sich auf unterschiedliche Körperteile beschränken, genauso aber auch den kompletten Körper umfassen.
Im Vergleich zu klassischen Exoskeletten, mit denen das Ziel verfolgt wird, die Kraft zu steigern und die Mobilität zu verbessern, verfolgt der neue Forschungsansatz weiterreichende Ziele. Durch eine systematische Integration von Mensch und Maschine innerhalb eines Systems mit gemeinsamem Regelkreis, soll neben der Kraft- und Mobilitätssteigerung primär eine Genauigkeitssteigerung, Qualitätssicherung und Fehlervermeidung durch z.B. integrierte Poka-Yoke-Mechanismen erzielt werden, um wirtschaftliche, technische und soziale Vorteile zu erreichen. So verfügt der Mensch über sehr gut ausgeprägte Sinnesorgane, mit denen er die Umgebung wahrnehmen kann.
Die technischen Systeme unterstützen den Menschen bei der Ausführung von Tätigkeiten mit ihren spezifischen Eigenschaften, wie z.B. Kraftunterstützung, Stabilisierung der Körperlage, Tätigkeiten mit einem starken Wiederholcharakter und quantitative Charakterisierung. Ökonomische und technologische Vorteile ergeben sich primär durch eine Unterstützung manueller Tätigkeiten, bessere Bewegungs- und Aufgabenausführung, höhere Verfügbarkeit des Mitarbeiters und eine höhere Produktivität, die zum einen auf die neue Technologie, zum anderen auf die Modularität zurückzuführen sind.
Weitere Vorteile resultieren vor allem aus der verbesserten ergonomischen Gestaltung des Arbeitsplatzes, der damit verbundenen geringeren Belastung des Mitarbeiters und der langfristigen Integration des Menschen in die Berufs- und Arbeitswelt. Der speziell zur Unterstützung manueller Tätigkeiten in der Produktion entwickelte Ansatz ist auch auf andere Bereiche des Berufs- und Alltagslebens (z.B. Pflege, Rehabilitation und Teilhabe) übertragbar, da ähnliche Problemstellungen vorherrschen.
Durch Systeme nach dem Konzept des HHR sollen Menschen im Beruf und Alltag unterstützt werden (Kompensation arbeits- und altersbedingter Funktionseinbußen sowie Ermöglichung einer nachhaltigen Teilhabe am Berufs- und Alltagsleben). Hierbei lassen sich zwei wesentliche Anwendungsszenarien unterscheiden:
- Prävention psychischer und physischer Erkrankungen (z.B. präventive Unterstützung von Facharbeitern und von Pflegekräften bei manuellen Anwendungen und automatisierte Dokumentation zur Verringerung der psychischen Arbeitsbelastung sowie zur Qualitätssicherung).
- Operative Unterstützung und Wiedereingliederung älterer Menschen (z.B. Fortführung der Tätigkeiten unter Einsatz technischer Unterstützungssysteme bei sensomotorischen und kognitiven Funktionseinbußen sowie Wiedererlernen von Tätigkeiten).